Linear Motor is designed for use in biomedical equipment.
Press Release Summary:
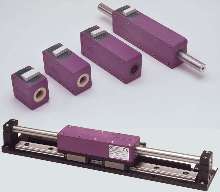
Low-inertia, direct-drive Micro Linear motor is suited for precision positioning and scanning applications. Tubular construction, with 0.016 in. symmetrical air gap between fixed and moving components, eliminates friction and wear. Unit completes repetitive 1 mm X-Y movements with 1 micron accuracy in 25 msec. Available with peak force from 19-45 N, motor offers peak acceleration ranges from 15-25 m/sec² and peak velocity to 3 m/sec.
Original Press Release:
Direct Drive Micro Linear Motor Excels At The Repetitive, High Accuracy, Millimeters Distance Positioning Required By Biomedical Equipment
Canton, MA, October 8, 2003-Copley Controls introduces the low inertia direct drive Micro Linear motor for precision positioning and scanning applications in medical/biotech instrumentation. The motor is ideal for making the repetitive short distance moves that typically occur in high resolution blood cell imaging, genome research and other medical applications. (Rapid short distance high accuracy moves are notoriously difficult to achieve). Based on advanced polymer construction, the Micro Linear motor achieves the light weight and low inertia that are critical for fast response. An elegant tubular construction, with 0.016" symmetrical air gap between fixed and moving components, eliminates friction and wear. The Motor's electrically energized magnetic fields develop a powerful drive force. Light weight construction and freedom from friction and backlash permit the rapid acceleration, fast travel, and resonance free stopping necessary for fast repetitive positioning. The new motors can complete repetitive one millimeter X-Y movements with 1 micron accuracy in 25 milliseconds. Cost is comparable to lead screw drives whose inertia, friction and backlash cause performance to lag far behind the new linear motor's. Micro Motor Specs Micro Linear motors are available with peak force from 19 to 45 Newtons and continuous force from 3.1 to 8.7 Newtons. Peak acceleration ranges from 15 to 25 meters/second2 and peak velocity goes to 3 meters/sec. The motor's light weight, low inertia, and freedom from friction provide inherent superiority over lead screw mechanisms in repetitive short distance positioning applications. Micro Linear motors are available with thrust rod lengths from 62 mm to 510 mm; thrust rod diameter is 11 mm. The polymer constructed forcer, which encapsulate the motor's electrical drive coils, is available in lengths from 36 mm to 113 mm. Forcer width is 34 mm, height 25 mm. Loads mount directly onto the forcer, no additional mounting hardware is required. The motors operate from 75V DC supplies. They are designed for sinusoidal commutation and incorporate built-in Hall sensors to assist commutation. A PTC temperature sensor signals the drive amplifier to shut down to prevent overheating. Why Repetitive Short-Distance positioning Is Difficult Truck Analogy The task of stepping in rapid succession through a sequence of precise X and Y coordinates only a few centimeters or even a few score microns apart, becomes increasingly difficult as speed and precision demands rise. Numerous mechanisms can complete short distance movements if time is not an issue. Likewise high accuracy ones. The technical challenges rise exponentially with need for simultaneous rapidity, accuracy, and short travel distance. Here's an analogy to illustrate the difficulty. Consider the imaginary task of moving a large loaded truck in precise six inch increments. To overcome the vehicle's inertia and static friction, the driver will press the "pedal to the metal." Once the vehicle is moving, accelerator pressure is slackened and the driver's foot shifts to the brake. However, vehicle momentum and the high engine speed will tend to carry the truck beyond the required six inches before the driver can brake hard. Such vehicle control tasks are obviously difficult, and are especially difficult if many short distance movements are required in rapid succession. The positioning task is no less challenging when travel is scaled down to millimeters, accuracy tightened to microns, and positioning time shrunk to milliseconds. Lead Screw Positioning Traditionally, instrumentation for positioning slides, test tube and micro arrays has depended on lead screw mechanisms. Today's demands for higher throughput, which translates into faster acceleration and speed, as well as stop-on-a-micron accuracy, run into fundamental lead screw limitations. A review of the lead screw's drawbacks will explain the Micro Linear motor's freedom from these limiting mechanisms. The discussion will also demonstrate the linear motor's inherent superiority in fast, repetitive high accuracy, short distance positioning. Lead Screw Limitations The lead screw stage, Figure 2 previous page, top, reveals the barriers to lead screw responsiveness. For a start, the drive motor and lead screw itself imposes substantial rotational inertia, which limits acceleration and responsiveness for short distance moves. The lead screw stage also has six bearings, which introduce speed-limiting friction. Worse, the lead screw itself, in driving against the nut on the load bearing platform, adds further friction, and more problematic, the potential for stick/slip that complicates starting and precise stopping. Finally, backlash between the lead screw and drive nut adds to system imprecision, especially when long term wear degrades lead screw integrity. Lead Screw Reliability Compared to linear motors, lead screw positioning mechanisms are very noisy, which can be important in lab/hospital environments. The lead screw itself needs to be greased, which introduces maintenance and cleanliness issues. In raising lead screw RPM to maximizes random access positioning, lead screws tend to spray off the lubricant, complicating maintenance efforts. Overall, given the number of parts and lead screw wear, downtime and long-term reliability suffer significantly in comparison with the linear motor's excellent uptime record. Micro Motor Sheds Performance Limiting Barriers The Micro Linear motor is very simple. It consists of two basic parts: thrust rod and forcer. The thrust rod contains high intensity permanent magnets (A), and the load carrying forcer (B), whose electrical drive coils are encapsulated in an advanced lightweight polymer. The forcer, supported by low friction bearings, surrounds the thrust rod, and is propelled along the thrust rod's length by digitally controlled magnetic fields. Multiple Inherent Advantages A distinguishing aspect of the linear motor is the 0.016" air gap between forcer and thrust rod. In contrast to the lead screw's friction producing drive mechanism, there is no contact-hence no friction & wear-between thrust rod and forcer. A wealth of advantages stem from the motor's tubular, contact-free construction. Absence of friction, coupled with the forcer's light weight, yield acceleration almost an order-of-magnitude better than any comparable lead screw (to 290 Newtons). More subtle, but vitally significant for rapid starting and stopping, there are no stick/slip concerns to complicate servo control and braking. With only one set of bearings, versus six bearings and lead screw friction, the linear motor unites superior speed and agility with unmatched acceleration. Last but not least, and unlike lead screw positioners, the linear motor has no mechanism to create accuracy degrading backlash. In all, today's Micro linear motors relegate lead screw mechanisms to solving yesterday's problems. System Design Ease The 0.016" air gap between forcer and thrust rod introduces a very significant application benefit. It obviates the need for exact alignment between forcer and thrust rod. By relaxing the force/rod concentricity specifications, the air gap simplifies integration of Micro Linear motors into high performance positioning stages. Sinusoidal coil excitation and magnetic symmetry of the tubular design also ensure constant drive force throughout forcer travel. Versus Alternative Linear Motor Configurations The Micro Linear motor's tubular construction simplifies cooling because heat is radiated from the thruster's full circumference. Loads-in the form of tools for holding slides, test tubes and so forth-mount directly onto the forcer. No additional mounting hardware is required. Applications Micro direct drive linear motors meet today's medical industry need for fast throughput, high reliability and low cost. The motors are particularly adept at setting new throughput standards in repetitive positioning applications that demand high speed, high accuracy, and small travel distances. Delivery o Contact o Price Delivery: Stock- 4 weeks ARO. Contact: Jim Woodward, Ext. 261 Copley Controls Corporation 20 Dan Road, Canton, MA 02021 Tel: 781 828-8090 o Fax: 781 828-6547 Internet: www.copleycontrols.com Email: sales@copleycontrols.com Price (1 - 9): From $235 (Forcer +Thrust Road)